Я пишу приложение C++ с использованием библиотеки OpenCV для обнаружения объектов на изображениях. Эти изображения выглядят так: http://fs1.directupload.net/images/150311/my6uczfn.png Верхняя часть изображения, которая является черной, может быть проигнорирована.OpenCV найти контуры закрытых объектов
{kind=link}
Я знаю, что каждый пиксель, который не является частью желаемого объекта, будет окрашен в белый цвет. Я пытаюсь выяснить, сколько объектов интересует изображение и где они находятся. До сих пор я написал следующий код:
Mat image = imread("2.png", CV_LOAD_IMAGE_COLOR);
if(!image.data)
{
std::cout << "Could not open or find the image." << std::endl;
}
Range range_rows(0, image.size().height);
Range range_columns_left(0, image.size().width);
Range range_columns_middle(image.size().width, image.size().width * 2);
Range range_columns_right(image.size().width * 2, image.size().width * 3);
Mat display_mat(image.size().height, image.size().width * 3, CV_8UC3);
Mat left(display_mat, range_rows, range_columns_left);
image.copyTo(left);
Mat classified_image;
threshold(image, classified_image, 254, 255, THRESH_BINARY);
Mat middle(display_mat, range_rows, range_columns_middle);
classified_image.copyTo(middle);
Mat cimage = Mat::zeros(image.size(), CV_8UC3);
Mat classified_grayscale_image;
cvtColor(classified_image, classified_grayscale_image, CV_RGB2GRAY);
std::vector< std::vector<cv::Point> > contours;
findContours(classified_grayscale_image, contours, CV_RETR_LIST, CV_CHAIN_APPROX_NONE);
for(size_t counter = 0; counter < contours.size(); counter++)
{
std::cout << "Contours size: " << contours[counter].size() << std::endl;
if(contours[counter].size() < 6)
continue;
Mat pointsf;
Mat(contours[counter]).convertTo(pointsf, CV_32F);
RotatedRect box = fitEllipse(pointsf);
drawContours(cimage, contours, (int)counter, Scalar::all(255), 1, 8);
ellipse(cimage, box, Scalar(0,0,255), 1, CV_AA);
std::cout << "Ellipse Parameter:\t";
ellipse(cimage, box.center, box.size*0.5f, box.angle, 0, 360, Scalar(0,255,255), 1, CV_AA);
Point2f vtx[4];
box.points(vtx);
for(int j = 0; j < 4; j++)
line(cimage, vtx[j], vtx[(j+1)%4], Scalar(0,255,0), 1, CV_AA);
}
Mat right(display_mat, range_rows, range_columns_right);
cimage.copyTo(right);
namedWindow("Results", CV_WINDOW_AUTOSIZE);
imshow("Results", display_mat);
waitKey(0);
return 0;
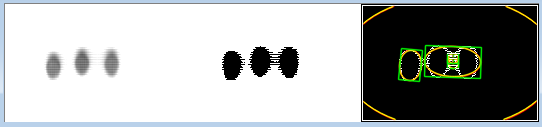
Результат выглядит следующим образом: http://fs1.directupload.net/images/150311/toiy3aes.png
{kind=link}
Как вы видите, классификация, что является объектом, а что нет, не является совершенным, так 2 объекта распознаются как один. Классификация будет улучшена, но может произойти что-то подобное, если эти объекты очень близки. Еще большая проблема - когда они касаются друг друга. Как я могу сделать правильное распознавание объектов в случае, показанном выше? Есть идеи?
Я использовал ваше второе предложение и с точки зрения подсчета объектов получаю неплохие результаты, спасибо за помощь и извините за поздний ответ. – Daiz