1
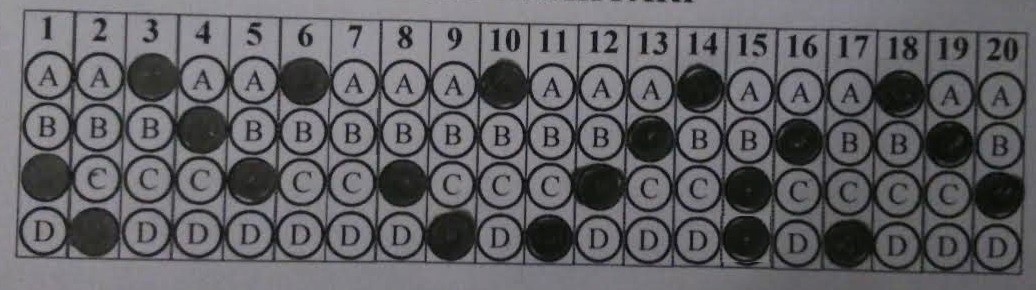
Я могу определить наибольший контур листа ответов (20 вопросов, каждый из которых имеет 4 альтернативы)Как обнаружить отмеченные черные области внутри самого крупного контура прямоугольника?
После того, как самый большой контур ничьей, что мне делать? Разделите матрицу прямоугольником на ячейку 20x4? Или найти счетчик снова, но на этот раз внутри прямоугольника? Я не знаю, что мне нужно. Просто я хочу получить, что отмечено.
Я смотрел this documant.
Как загорать «разделение изображения и разделение»?

public Mat onCameraFrame(CameraBridgeViewBase.CvCameraViewFrame inputFrame) {
return findLargestRectangle(inputFrame.rgba());
}
private Mat findLargestRectangle(Mat original_image) {
Mat imgSource = original_image;
hierarchy = new Mat();
//convert the image to black and white
Imgproc.cvtColor(imgSource, imgSource, Imgproc.COLOR_BGR2GRAY);
//convert the image to black and white does (8 bit)
Imgproc.Canny(imgSource, imgSource, 50, 50);
//apply gaussian blur to smoothen lines of dots
Imgproc.GaussianBlur(imgSource, imgSource, new Size(5, 5), 5);
//find the contours
List<MatOfPoint> contours = new ArrayList<MatOfPoint>();
Imgproc.findContours(imgSource, contours, hierarchy, Imgproc.RETR_LIST, Imgproc.CHAIN_APPROX_SIMPLE);
hierarchy.release();
double maxArea = -1;
int maxAreaIdx = -1;
MatOfPoint temp_contour = contours.get(0); //the largest is at the index 0 for starting point
MatOfPoint2f approxCurve = new MatOfPoint2f();
Mat largest_contour = contours.get(0);
List<MatOfPoint> largest_contours = new ArrayList<MatOfPoint>();
for (int idx = 0; idx < contours.size(); idx++) {
temp_contour = contours.get(idx);
double contourarea = Imgproc.contourArea(temp_contour);
//compare this contour to the previous largest contour found
if (contourarea > maxArea) {
//check if this contour is a square
MatOfPoint2f new_mat = new MatOfPoint2f(temp_contour.toArray());
int contourSize = (int)temp_contour.total();
Imgproc.approxPolyDP(new_mat, approxCurve, contourSize*0.05, true);
if (approxCurve.total() == 4) {
maxArea = contourarea;
maxAreaIdx = idx;
largest_contours.add(temp_contour);
largest_contour = temp_contour;
}
}
}
MatOfPoint temp_largest = largest_contours.get(largest_contours.size()-1);
largest_contours = new ArrayList<MatOfPoint>();
largest_contours.add(temp_largest);
Imgproc.cvtColor(imgSource, imgSource, Imgproc.COLOR_BayerBG2RGB);
Imgproc.drawContours(imgSource, contours, maxAreaIdx, new Scalar(0, 255, 0), 1);
Log.d(TAG, "Largers Contour:" + contours.get(maxAreaIdx).toString());
return imgSource;
}
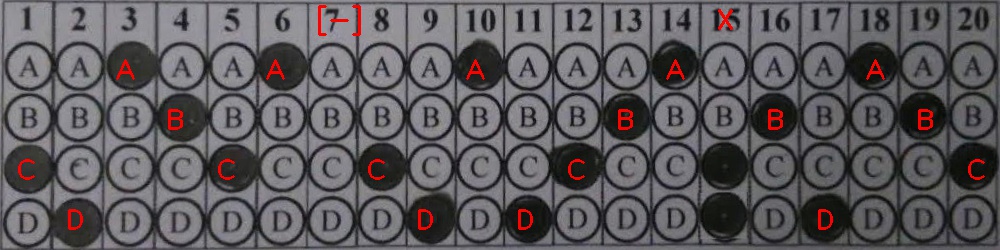
UPDATE 1:
Я хочу поблагодарить вас @sturkmen за его ответ. Теперь я могу читать и находить черные регионы. Здесь коды Android:
public View onCreateView(LayoutInflater inflater, ViewGroup container,
Bundle savedInstanceState) {
View _view = inflater.inflate(R.layout.fragment_main, container, false);
// Inflate the layout for this fragment
Button btnTest = (Button) _view.findViewById(R.id.btnTest);
btnTest.setOnClickListener(new View.OnClickListener() {
@Override
public void onClick(View v) {
Mat img = Imgcodecs.imread(mediaStorageDir().getPath() + "/" + "test2.jpg");
if (img.empty()) {
Log.d("Fragment", "IMG EMPTY");
}
Mat gray = new Mat();
Mat thresh = new Mat();
//convert the image to black and white
Imgproc.cvtColor(img, gray, Imgproc.COLOR_BGR2GRAY);
//convert the image to black and white does (8 bit)
Imgproc.threshold(gray, thresh, 0, 255, Imgproc.THRESH_BINARY_INV + Imgproc.THRESH_OTSU);
Mat temp = thresh.clone();
//find the contours
Mat hierarchy = new Mat();
Mat corners = new Mat(4,1, CvType.CV_32FC2);
List<MatOfPoint> contours = new ArrayList<MatOfPoint>();
Imgproc.findContours(temp, contours,hierarchy, Imgproc.RETR_EXTERNAL, Imgproc.CHAIN_APPROX_SIMPLE);
hierarchy.release();
for (int idx = 0; idx < contours.size(); idx++)
{
MatOfPoint contour = contours.get(idx);
MatOfPoint2f contour_points = new MatOfPoint2f(contour.toArray());
RotatedRect minRect = Imgproc.minAreaRect(contour_points);
Point[] rect_points = new Point[4];
minRect.points(rect_points);
if(minRect.size.height > img.width()/2)
{
List<Point> srcPoints = new ArrayList<Point>(4);
srcPoints.add(rect_points[2]);
srcPoints.add(rect_points[3]);
srcPoints.add(rect_points[0]);
srcPoints.add(rect_points[1]);
corners = Converters.vector_Point_to_Mat(
srcPoints, CvType.CV_32F);
}
}
Imgproc.erode(thresh, thresh, new Mat(), new Point(-1,-1), 10);
Imgproc.dilate(thresh, thresh, new Mat(), new Point(-1,-1), 5);
Mat results = new Mat(1000,250,CvType.CV_8UC3);
Mat quad = new Mat(1000,250,CvType.CV_8UC1);
List<Point> dstPoints = new ArrayList<Point>(4);
dstPoints.add(new Point(0, 0));
dstPoints.add(new Point(1000, 0));
dstPoints.add(new Point(1000, 250));
dstPoints.add(new Point(0, 250));
Mat quad_pts = Converters.vector_Point_to_Mat(
dstPoints, CvType.CV_32F);
Mat transmtx = Imgproc.getPerspectiveTransform(corners, quad_pts);
Imgproc.warpPerspective(img, results, transmtx, new Size(1000,250));
Imgproc.warpPerspective(thresh, quad, transmtx, new Size(1000,250));
Imgproc.resize(quad,quad,new Size(20,5));
Imgcodecs.imwrite("results.png",quad);
//show image
showImage(quad);
//store image
storeImage(quad);
}
});
return _view;
}
public void showImage (Mat img) {
ImageView imgView = (ImageView) getActivity().findViewById(R.id.sampleImageView);
//Mat mRgba = new Mat();
//mRgba = Utils.loadResource(MainAct.this, R.drawable.your_image,Highgui.CV_LOAD_IMAGE_COLOR);
Bitmap img2 = Bitmap.createBitmap(img.cols(), img.rows(),Bitmap.Config.ARGB_8888);
Utils.matToBitmap(img, img2);
imgView.setImageBitmap(img2);
}
public File mediaStorageDir() {
File _mediaStorageDir = new File(Environment.getExternalStorageDirectory()
+ "/Android/data/"
+ getActivity().getApplicationContext().getPackageName());
return _mediaStorageDir;
}
public void storeImage(Mat matImg) {
Bitmap bitmapImg = Bitmap.createBitmap(matImg.cols(), matImg.rows(),Bitmap.Config.ARGB_8888);
Utils.matToBitmap(matImg, bitmapImg);
String timeStamp = new SimpleDateFormat("ddMMyyyy_HHmm").format(new Date());
File mediaFile;
String mImageName="IMG_"+ timeStamp +".jpg";
mediaFile = new File(mediaStorageDir().getPath() + File.separator + mImageName);
File pictureFile = mediaFile;
try {
FileOutputStream fos = new FileOutputStream(pictureFile);
bitmapImg.compress(Bitmap.CompressFormat.PNG, 90, fos);
fos.close();
} catch (FileNotFoundException e) {
Log.d("FragmentMain", "File not found: " + e.getMessage());
} catch (IOException e) {
Log.d("FragmentMain", "Error accessing file: " + e.getMessage());
}
}
{kind=link}
{kind=link}
{kind=link}
спасибо. Я постараюсь как можно скорее. @sturkmen – RedLEON
i обновленный код C++. – sturkmen