Ваша проблема выглядит как анализ connected component!
Первое, что нужно представлять ваши данные в виде графика, и для этого есть множество библиотек. Возьмем пример в python: вы можете использовать Networkx или Graph-tool. Это просто, поскольку точка может быть представлена как узел. Что касается краев, у вас в основном есть несколько решений.
Вы можете выполнить сравнения грубой силы, которые сравнивают все точки друг с другом. Он будет работать в O (n * (n-1)/2), ok, если набор данных невелик. Если набор данных большой, вы можете использовать разные приближенные алгоритмы (KD-tree, ball-tree), реализованные в Flann или scikit-learn. Обратите внимание, что scikit-learn также дает вам сравнение грубой силы.
Целью здесь является создание ребра (ссылки) между двумя узлами (точками), если расстояние ниже вашего порога.
После добавления узлов и ребер в графе вы можете запустить подключенный компонентный алгоритм, который дает все связанные компоненты графика. Подключенный компонент - это в основном непрерывный набор узлов, связанных ребрами.
Обратите внимание, что как только ваша проблема представляется в виде графика, на помощь приходит почти 70 лет теории графов. Вы можете проверить, имеют ли некоторые регионы ту же форму, что и другие, используя subgraph isomorphism. Вы можете проверить важность каждой точки в каждом компоненте с помощью centrality measures. Вы также можете разбивать непрерывное на субрегионы без необходимости порогового значения краев с помощью graph partitioning.
У вас может быть живой пример непрерывного графика, разрезанного на несколько разделов на моем blog.
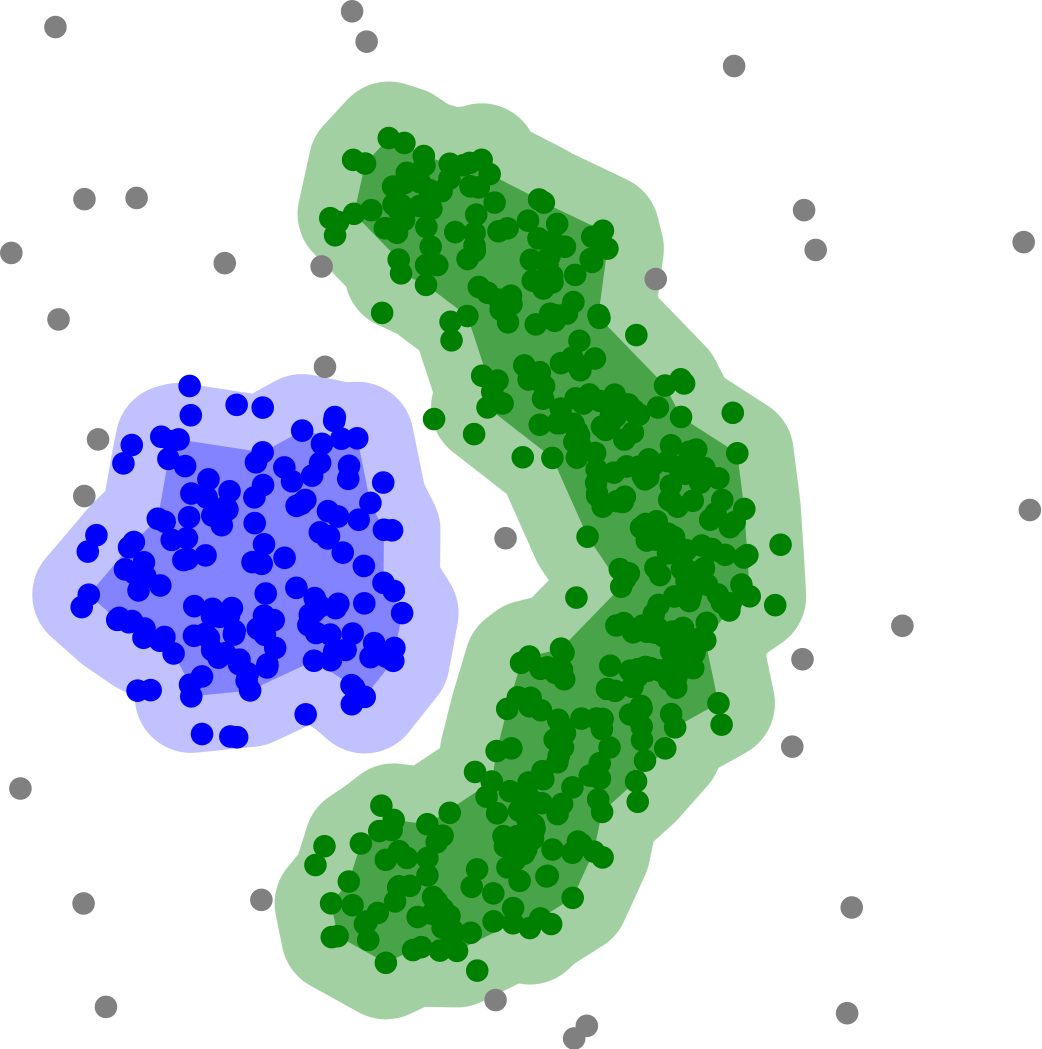
Для аргумента: здесь приведен пример нескольких связанных компонентов, принадлежащих одному и тому же графу (с собственными ребрами).

Пример поможет. – NoChance
Ну. Это сложная проблема, и вам придется изучить эти концепции для ее решения. Мы не помогаем людям, которые не прилагают достаточных усилий самостоятельно. – ElKamina
Вопрос подразумевает, что обрезание фиксируется в пределах прогона, но фиксируется ли оно от одного прогона к другому? –